Fiberbots
Fiberbots : Design of a Multi-agent, Fiber Composite Digital Fabrication System
Markus Kayser, Levi Cai, Sara Falcone, Christoph Bader, Nassia Iglessis, Barrak Darweesh, João Costa | 2018 | MIT MEDIA LAB
FIBERBOTS is a digital fabrication platform fusing cooperative robotic manufacturing with abilities to generate highly sophisticated material architectures. The platform can enable design and digital fabrication of large-scale structures with high spatial resolution leveraging mobile fabrication nodes, or robotic ‘agents’, designed to tune the material make-up of the structure being constructed on the fly as informed by their environment.
Some of nature’s most successful organisms collaborate in a swarm fashion. Nature’s builders leverage hierarchical structures in order to control and optimize multiple material properties. Spiders, for instance, spin protein fibers to weave silk webs with tunable local and global material properties, adjusting their material composition and fiber placement to create strong yet flexible structures optimized to capture prey. Other organisms, such as bees, ants, and termites cooperate to rapidly build structures much larger than themselves.

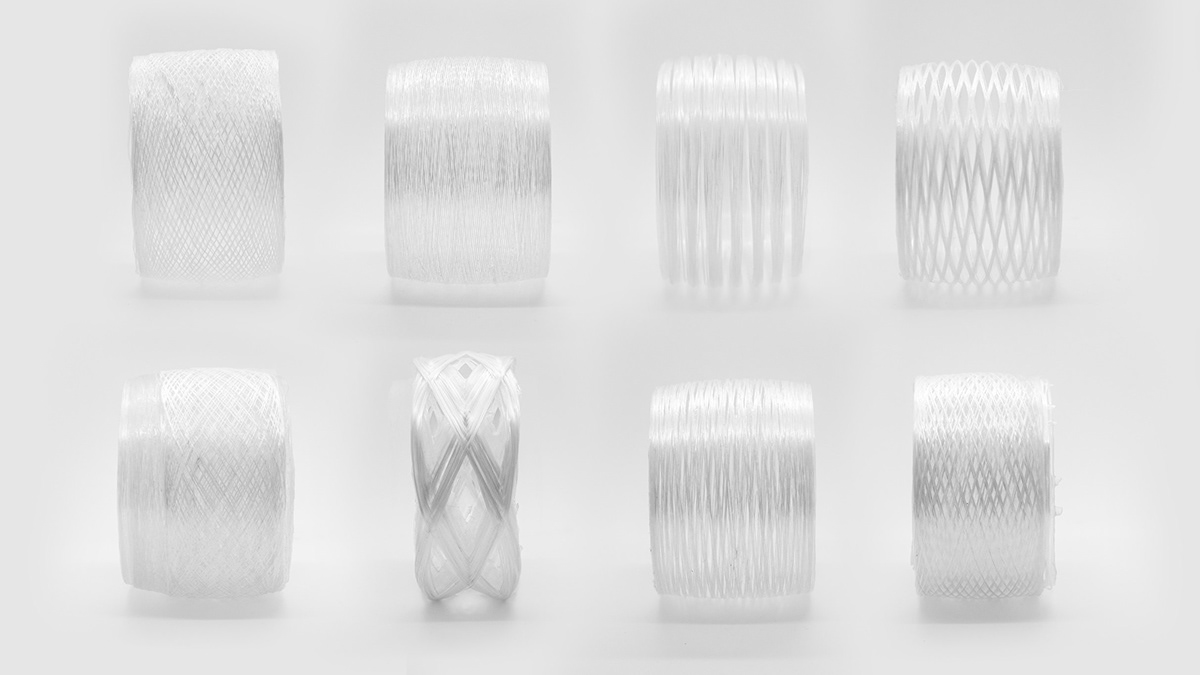
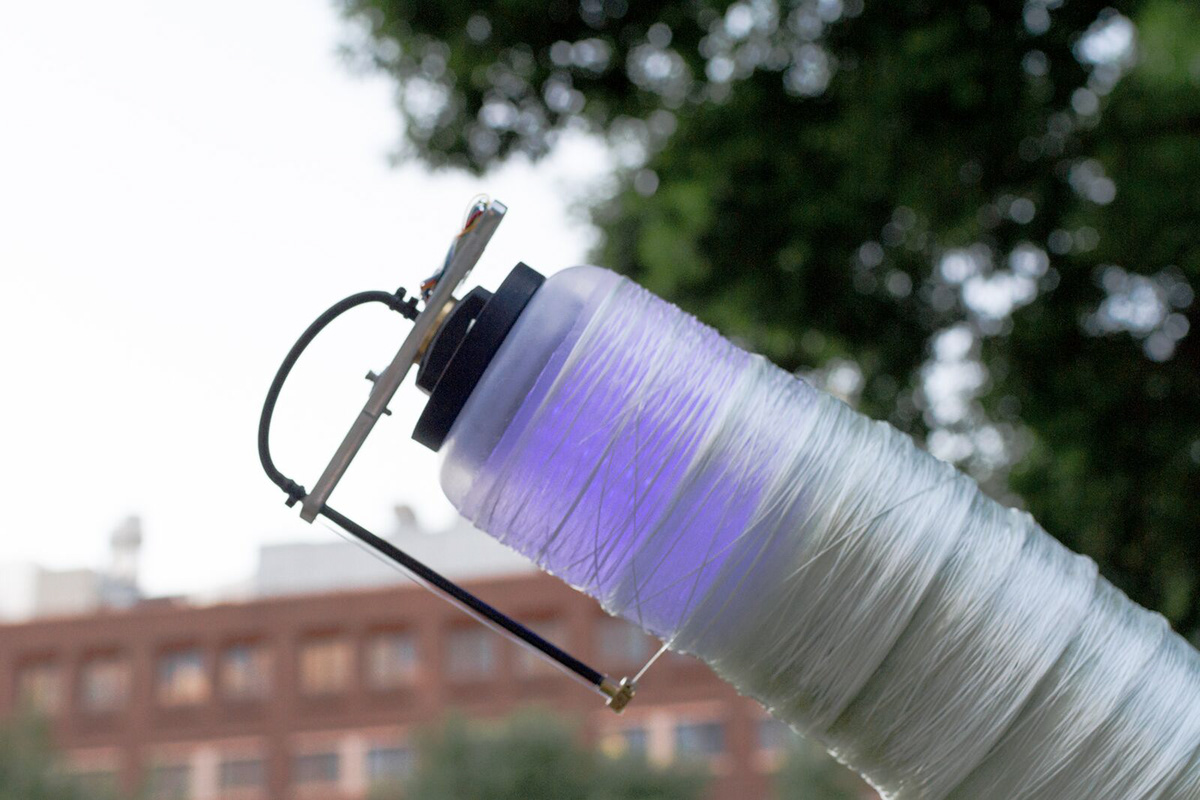
The FIBERBOTS are a swarm of robots designed to wind fiberglass filament around themselves to create high-strength tubular structures. These structures can be built in parallel and interwoven to rapidly create architectural structures. The robots are mobile and use sensor feedback to control the length and curvature of each individual tube according to paths determined by a custom, environmentally informed, flocking-based design protocol. This provides designers the ability to control high-level design parameters that govern the shape of the resulting structure without needing to tediously provide commands for each robot by hand.
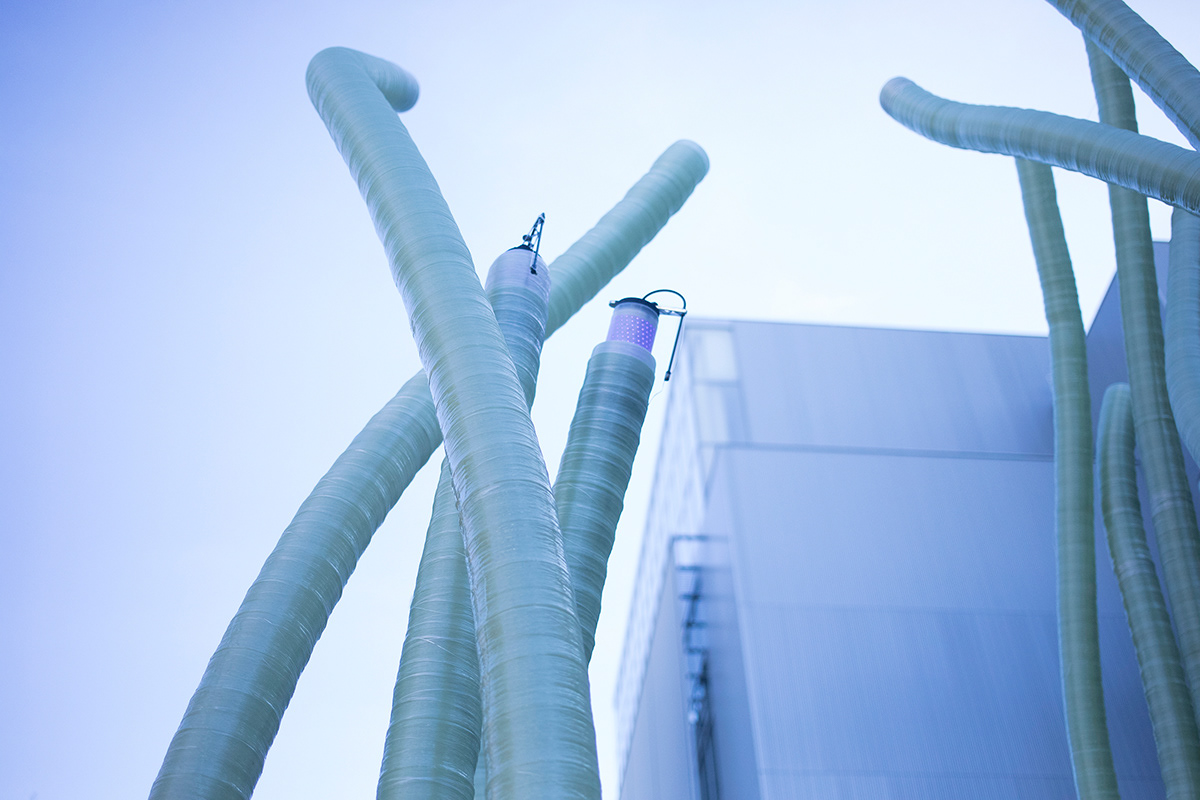
The 16 robots, including the design system to control them, were developed in-house and deployed to autonomously create a 4.5m tall structure. The structure remained outside and undamaged through Massachusetts’s winter months, demonstrating the potential of this enabling technology towards future collaborative robotic systems to create once in-feasible designs in potentially far-reaching environments.





RESEARCH FRAMEWORK
Current manufacturing approaches can be classified with respect to two fundamental attributes: (1) the level of communication between fabrication units and (2) the degree of material tailorability. Until now manufacturing paradigms were confined to one of these attribute axes: with certain approaches utilizing sophisticated tailorable material but having virtually no communication and others assembling simple building blocks or pre-fabricated components in a cooperative fashion with high levels of intercommunication.

The majority of current research efforts in swarm construction focus on the aggregation of discrete building components (e.g. blocks or beams) mimicking traditional construction methods. Typically, these systems are developed around specific modular or prefabricated components, which constrain the possible geometries and functionality of the resulting structure. From a design perspective such efforts focus either on duplicating existing rectilinear forms as made by conventional construction methods or on local-to-global models which define sets of behavior in simulation and explore the resulting structures with little focus on physical constraints.

Single node additive Rapid Fabrication (RF) and Rapid Manufacturing (RM) technologies have emerged, since the mid 1980’s, as promising platforms for building construction automation. Whether liquid-based (e.g. stereolithography), powder-based (e.g. selective-laser sintering), or solid-based processes (e.g. fused deposition modeling) – characteristic to such technologies are: (1) the use of mostly nonstructural materials with homogeneous properties; (2) the limitation of product size to gantry size; and (3) the layer-by-layer fabrication of products. A swarm approach to manufacturing can radically transform digital construction by (1) digitally fabricating structural materials; (2) generating products and objects larger than their gantry size; and (3) supporting non-layered construction by offering novel fabrication processes such as robotic weaving and free-form printing.
These methods are conducive to function generation, however cannot be easily scaled to large systems. With swarm sensing and actuation, systems can become more responsive and adaptive to environmental conditions. Following Nature’s example, a swarm offers reliability and efficiency through distributed tasks, parallel actuation, and redundancy. This research seeks to depart from these uniaxial fabrication methods and develop fabrication units capable of being highly communicative while simultaneously depositing tailorable, multifunctional materials. Moreover, we intend to demonstrate that our research framework is applicable across scales: from the micro-scale to the product scale and, uniquely, to the architectural scale.

CREDITS
The Fiberbot project was developed by The Mediated Matter Group at the MIT Media Lab. Researchers include: Markus Kayser, Levi Cai, Sara Falcone, Christoph Bader, Nassia Inglessis, Barrak Darweesh, João Costa, and Prof. Neri Oxman (Founding Director).

